Who are we?
Our team includes students from bachelor's and master's programs in mechanical engineering, computer science, electrical engineering and transportation engineering. We develop autonomous system concepts, implement software for self-driving functionality and handle testing. We make most decisions collaboratively and value team ownership. Since the module is still growing, new members can make an immediate and meaningful impact.


What do we do and where can you get involved?
Hardware
The vehicle uses multiple sensors to estimate ego motion and perceive the environment. Their data is processed on a high-performance compute unit that outputs a planned trajectory. A secondary control unit executes this trajectory in real driving conditions by controlling motors and vehicle actuation. Steering is handled via electric motor and gearbox; acceleration is achieved through motor control; deceleration combines recuperation and mechanical braking. In addition, the car includes regulation-required safety braking and status signaling systems.
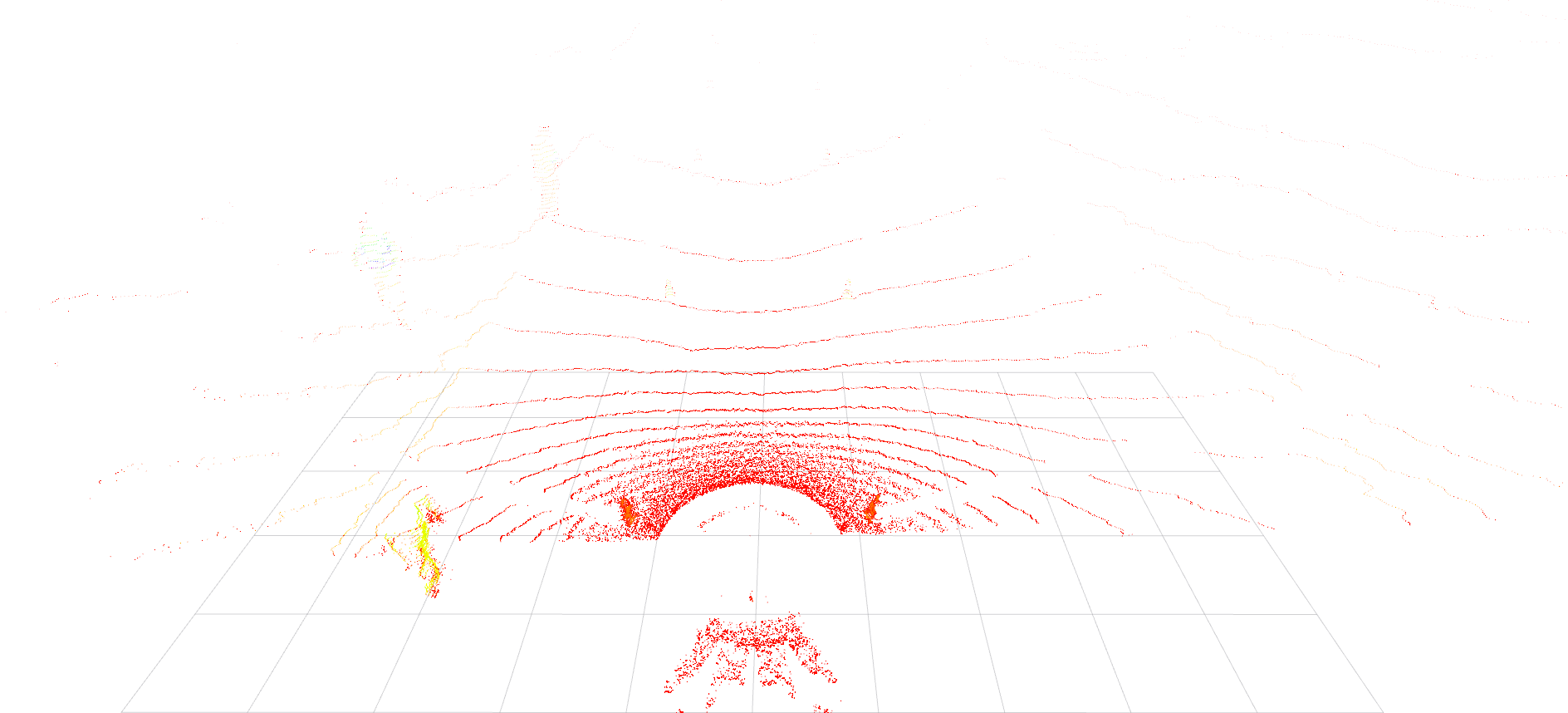
Object Detection
We use an Ouster LS1 64 LiDAR and a ZED stereo color camera for perception. LiDAR point clouds are clustered to obtain robust cone positions. Camera processing is done with a state-of-the-art neural network to enrich and validate LiDAR-based detection.
Trajectory Planning
Trajectory planning computes the vehicle path predictively using Delaunay triangulation. Inputs include cone positions from object detection and current vehicle state/localization from state estimation. Outputs are time-discrete steering commands and positive/negative acceleration targets for execution.
Vehicle State Estimation and Localization
We fuse data from INS, GPS, wheel speed and other sensors to determine global vehicle position. Sensor fusion is based on Kalman filtering, providing improved state estimates and uncertainty-aware prediction.