wir werden Sie weiterhin monatlich mit einem Update versorgen.
Auch diesen Monat bieten sich wieder spannende Einblicke in die einzelnen Module. Es geht unter anderem um die neue Nase des Fahrzeuges und die darunterliegenden Crashbox, um die Pedalbox und um die Trajektorieberechnung unseres autonomen Fahrzeuges.
Grußwort der Teamleitung
Liebe Leserinnen und Leser,
ich hoffe Sie hatten ein paar schöne Ostertage in dieser doch etwas anderen Zeit.
Wie wir schon im letzten Newsletter berichtet hatten, sind wir aktuell mitten in der Fertigungsphase für unseren elektrisch LR21. Dabei arbeitet das gesamte Team auf die nun festen Termine der Formula Student Wettbewerbe in Deutschland und Ungarn hin.
Im Zuge dessen müssen viele Materialtests und Systemerklärungen erbracht werden, damit unsere Fahrzeuge auch zugelassen wird und die nötigen Sicherheitskriterien erfüllt. Wie diese Tests genau aussehen, werden die einzelnen Abteilungen in diesem Newsletters, noch ausführlich berichten.
Nebenbei neigt sich auch die Arbeit an unserer neuen Webseite ihrem Ende entgegen, welche Sie noch diesen Monat, selbst erleben dürfen.
Wir wünschen Ihnen nun wieder viel Spaß dabei, sich im Folgenden in die Details der verschiedenen Entwicklungen einzulesen.
Aerodynamik
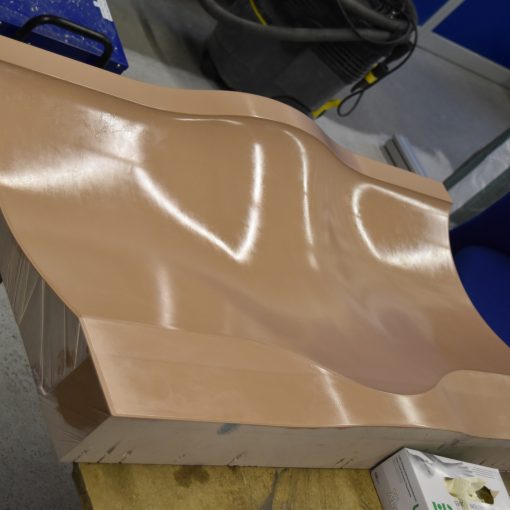
Im März wurde die Entwicklung am DRS des Frontflügels und der Halterung des Heckflügels fortgesetzt. Dafür wird gerade an einer Hypermesh-Simulation gearbeitet, um den Lagenaufbau der Platte zu bestimmen. Des Weiteren wurde die Nase auf die geänderte Crashbox angepasst. Wir möchten uns nochmal bei Wolfcomp bedanken, bei der wir diesen Monat die Frontflügelform abholen konnten.
Da nun über jedes große aerodynamisches Bauteil schon geschrieben wurde, soll es dieses Mal um die kürzlich veränderte Nase gehen.
Die Front unserer bisherigen Nase war sehr hoch angesetzt, da der Plan war, dem Unterboden und dem Seitenkasten möglichst viel sauberen Luftstrom zur Verfügung zu stellen. Leider kam es zwischen unserem tiefen Monocoque und dem zentralen Teil des Frontflügels zu einer Engstelle, die diesen Luftstrom begrenzt. Es gelang also nicht die Luft nach unten zu leiten und sie wich auf die Seiten hin aus. Darum haben wir nun bei der notwendigen Überarbeitung versucht die Nase vorne möglichst schmal zu halten. Außerdem haben wir die Front nach Unten gezogen, was wegen der geänderten Crashbox sowieso nötig war. Somit erhoffen wir uns von der Nase weniger Widerstand und Auftrieb, während der Rest des Fahrzeugs nicht negativ beeinflusst werden sollte.
bisherige Nase
neue Nase
Chassis
Der März stand fürs Chassis ganz im Zeichen von Materialtests!
Die über die vergangenen zwei Jahre entwickelten Lagenaufbauten fürs Monocoque in Sandwichbauweise und den Faserverbund-Akkucontainer, die Gurt-Befestigungen sowie die Crashbox mussten nun getestet werden, um nachzuweisen, dass die Sicherheit des Fahrers und aller zuätzlich Beteiligten gewährleistet ist.
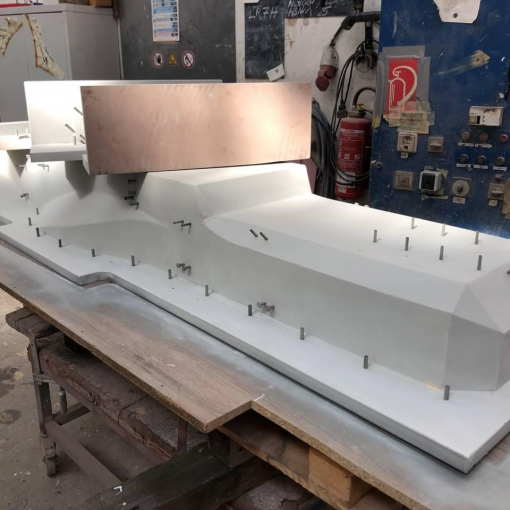
Da in diesem Jahr, aufgrund der Pandemie, an einem neuen Standort getestet wurde, bestand die erste Herausforderung in der Fertigung von neuen Testvorrichtungen. Besonders spannend war dabei ein prinzipieller Nachbau des vorderen Teils unseres Monocoques. Dies war durch die neuen Regeln eine Vorraussetzung, um eine Faserverbund Anti-Intrusion-Plate (AIP) zu verwenden, auf der die Crashbox befestigt wird. Insgesamt konnte im Bereich der Crashbox durch eine Optimierung der Crashboxgeometrie und einer neuen Form der AIP – bedingt durch das neue Monocoque – 50% des bisherigen Gewichts eingespart werden. Auf dem Bild präsentieren zwei Mitglieder die erwähnte Testvorrichtung für einen Fallturmversuch sowie die erfolgreich getestete Crashbox.
Nach den 3-Punkt-Biege- und Durchstoßversuchen konnten Laminataufbauten verifiziert werden, mit denen ein 19 kg Monocoque prognostiziert wird. Dies entspricht wiederum einer Ersparnis von 7 kg gegenüber dem Vorgänger. Es sei jedoch dazu erwähnt, dass dies auch in der neuen Geometrie sowie dem erstmaligen Einsatzes eines Aluminium-Fronthoops (vorne sitzender Überrollbügel) begründet ist.
Um Aluminium als Werkstoff nutzen können, sind Aluminium-Schweiß-Zugproben notwendig. Damit können die benötigten Parameter zur Auslegung des Front Hoops bestimmt werden. Mit den Materialversuchen wurde ebenso der Lagenaufbau für den ersten Faserverbund-Akkucontainer der Teamgeschichte festgelegt.
Nun freuen wir uns auf die Fertigung der einzelnen Bauteile!
links: neue Testvorrichtung
rechts: erfolgreich getestet Crashbox
Test der Lagenaufbauten
Fahrdynamik
Im März erreichten uns sehr viele Pakete für die Fahrdynamik, sodass wir mit den gelieferten Fertigungs- und Normteilen bereits einige Baugruppen fertig montieren können, sobald das Monocoque so weit ist und in den nächsten Wochen die letzten Teile eintreffen.
Außerdem konnten wir im vergangenen Monat die Montage der Systeme für das autonome Fahren am LR20 abschließen und mit den ersten Funktionstests beginnen, die auch im April fortgesetzt werden.
In diesem Monat werden wir die Pedalbox genauer vorstellen.
Der Hauptfokus der Fahrdynamik diese Saison liegt in der Gewichtsersparnis bei gleichzeitiger optimaler Funktionalität und die Pedalbox war dafür keine Ausnahme. Im Vergleich zu der LR19 Pedalbox konnten wir sehr viel Gewicht einsparen, ohne Kompromisse hinsichtlich der Funktionalität machen zu müssen. So nutzten wir, wie in anderen Baugruppen auch, die Topologieoptimierung um die Gewichtsersparnis zu realisieren, ohne dabei an Steifigkeit einzubüßen.
Eine weitere Innovation der diesjährigen Pedalbox ist die Brake Automation. Diese ermöglicht mittels eines Servomotors die Einstellung der Balance Bar, wodurch die Bremskraftverteilung automatisch angepasst werden kann.
Zusammengefasst hat die LR21 Pedalbox somit eine höhere Steifigkeit, ein besseres Packaging und bietet bessere Möglichkeiten für die spätere Automatisierung als die des LR19 und das bei einer Gewichtsersparnis von ca. 35%.
neue Pedalbox
Driverless
Die Berücksichtigung von Hindernissen beim autonomen Fahren, zur Planung einer kollisionsfreien Route, ist eine anspruchsvolle Disziplin. Hierbei müssen geometrische Beziehungen zwischen dem sich bewegenden lokalen Ego Fahrzeug und den global feststehenden Hindernissen, in unserem Fall Verkehrsleitkegel, berücksichtigt werden. Unsere Trajektorienplanung verwendet je nach Einstellungen den Voronoi-Algorithmus oder die Delauney-Triangulation.
Aufgrund besserer Ergebnisse wird die Delauney-Triangulation auf Kosten eines erhöhten Rechenaufwandes bevorzugt. Hierbei werden Dreiecke aus den Leitkegeln, welche die Strecke begrenzen, gebildet. Gelbe Leitkegel stellen hierbei die rechte und blaue Leitkegel die linke Begrenzung der zu befahrenden Rennstrecke dar. Die Delauney-Triangulation bildet immer Kreise durch 3 erkannte Leitkegel-Positionen. Um sicherzustellen, dass sich die im Anschluss gebildeten Punkte der Trajektorienplanung innerhalb der Strecke befinden, muss jeweils einer der drei einbezogenen Leitkegel andersfarbig sein. Des Weiteren sind immer 2 der 3 verwendeten Positionen von der letzten durchgeführten Iteration vorgegeben. Wenn 2 der gebildeten Kreise 2 identische Kegelpositionen verwenden und keinen zusätzlichen vierten Punkt eingrenzen, wird ein konvexes Viereck erzeugt. In diesem wird eine Diagonale, aus den gemeinsamen Punkten der Kreise, mit entsprechenden resultierenden Delauney Dreiecken, generiert. Dies ist in der nachfolgenden Abbildung dargestellt. Hierbei können zeitgleich aus identischen Leitkegel-Positionen unterschiedliche Kreise mit verschiedenen Diagonalen erzeugt werden. Dies resultiert darin, dass ein konvexes Viereck 2 unabhängige Diagonalen besitzen kann, welche die Genauigkeit der Ergebnisse erhöhen.
Delauney-Triangulation
Darauffolgend werden aus den Kanten der Delauney-Dreiecke, welche an beiden Enden Leitkegel mit unterschiedlichen Farben besitzen, Mittelpunkte berechnet. Die Varianz der Mittelpunkte in einem konvexen Viereck mit 2 Diagonalen ist dabei minimal. Dieser Prozess wird für alle erkannten Leitkegel-Positionen durchgeführt. Darauffolgend werden alle ermittelten Mittelpunkte, durch die Generierung von Zwischenpunkten, sogenannten Waypoints der abzufahrenden Route, interpoliert. Diese besitzen jeweils eine Pose, mit den Koordinaten des spezifischen Punktes sowie eine Orientierung, welche den Winkel bestimmt wie der Punkt durchfahren werden soll.
Wenn ein Leitkegel von der Objekterkennung des autonomen Systems nicht erkannt wurde, wird das konvexe Viereck durch die Berücksichtigung des sich am nächsten befindlichen, erkannten Verkehrsleitkegels verzogen. Die Abweichungen der errechneten Mittelpunkte der Kanten der Delauney Dreiecke sind hierbei aber minimal, wodurch dieser Ansatz eine stabile Mittelpunkt Generierung darstellt.
In der nachfolgenden Abbildung ist die Delaunay-Triangulation mit den resultierenden Delauney-Dreiecken, in der Disziplin Skidpad, visualisiert. In dem sich darunter befindlichen Bild ist des Weiteren die Route der abzufahrenden Strecke, welche zur Plausibilisierung der Fahrzeugregelung dient, visualisiert. Hierfür wird aktuell ein PI Regler verwendet.
Im letzten Monat wurde erfolgreich eine Trajektorienplanung, spezifisch für die autonome Mission Skidpad, entwickelt. Diese verfügt, im Vergleich zu der bereits lauffähigen Trajectory von Track Drive, über eine vorgeladene Map der Mission.
Aktuell wird die bestehende Trajektorienplanung hinsichtlich der Prozessstabilität optimiert. Des Weiteren wird eine zusätzliche Trajectorie für die autonome Mission Acceleration, ebenfalls mit einer vorgeladenen Map, entwickelt.
Delauney-Triangulation beim Skidpad
Route der abzufahrenden Strecke beim Skidpad
Antrieb & Elektronik Der März war für das Modul PowerElo bisher der ereignisreichste Monat der Saison 2021. Die Entwicklung der letzten Platinen, die Fertigung und Prüfung von ersten Akkustacks (Verschaltung von mehreren Zellen) und die Arbeit am Electrical System Form (ESF) für die Events mussten gleichzeitig durgeführt werden. Wir haben auch etwas Neues ausprobiert – manche von unseren Platinen werden mithilfe des Reflow-Verfahrens gefertigt, was im Vergleich zum Handlöten wesentlich schneller erfolgt, besonders wenn man über sehr großen Platinen wie die des Accumulator Management System (AMS) redet. Als erste Test-Objekte haben wir die AMS-Slave-Platinen für den schon erwähnten Teststack ausgewählt.
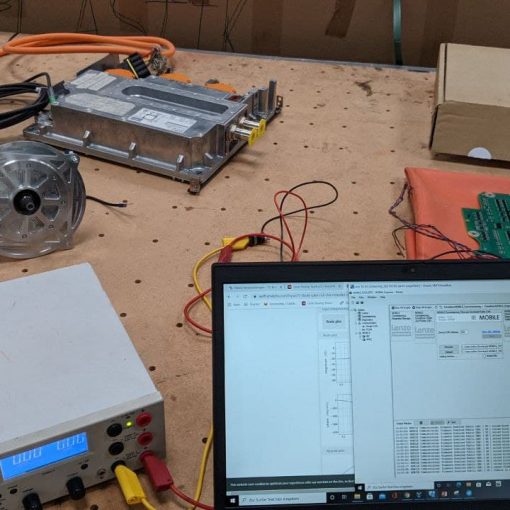
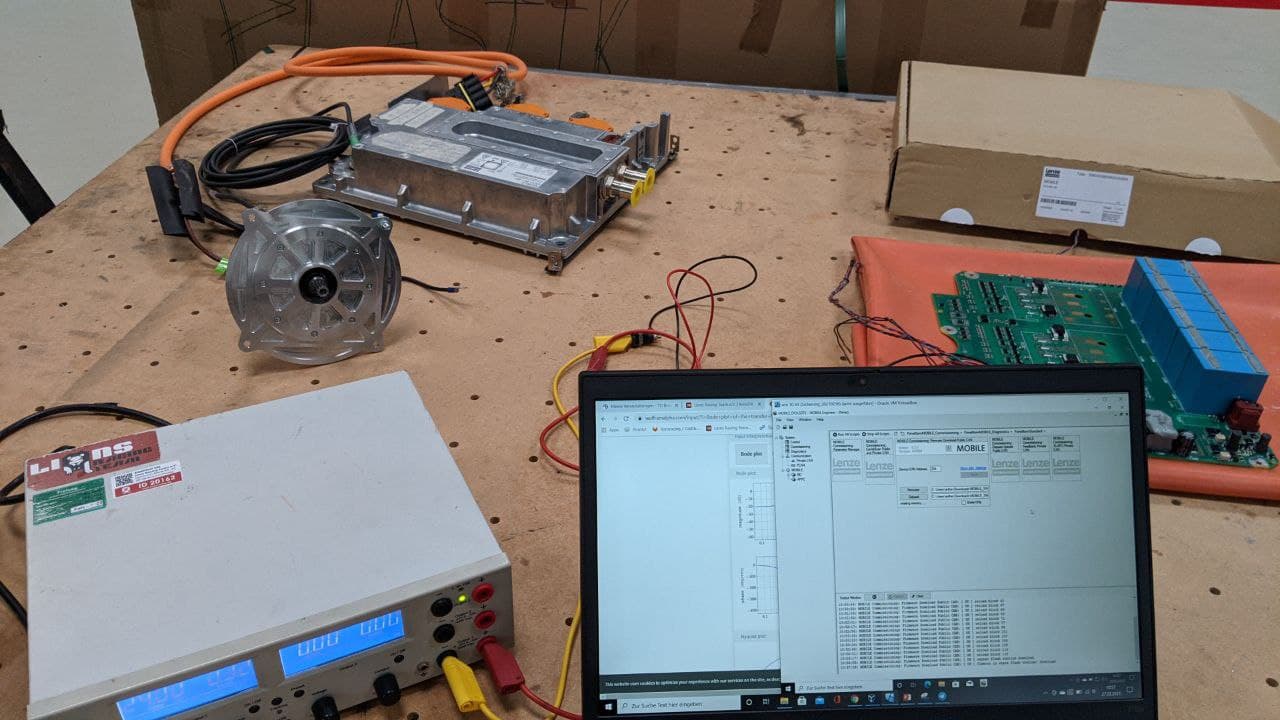
Als kleinen Bonus zeigen wir, wie wir Teile der Resolvertests für die Motoren durchführen, ohne die Motoren unseres Fahrzeugs zu benutzen. Dazu werden ein Netzteil, ein Modellbau-Servomotor mit Steuereinheit, der selbstentwickelte und 3D-gedrucke Prüfstand und ein Logikanalysator verwendet. Weitere Einblicke in unseren Testverfahren zeigen wir gerne in den folgenden Newsletter-Ausgaben.
Resolvertest
Wir möchten die Gelegenheit nutzen und Ihnen für Ihre Unterstützung und die Zusammenarbeit danken! Viele unserer Sponsoren und Unterstützer begleiten uns bereits viele Jahre mit einer höchsten Zuverlässigkeit. Insbesondere dieser langfristigen Unterstützung in den aktuellen Zeiten möchten wir unseren Dank aussprechen! Ohne Sie alle, als unsere Unterstützer, wäre dieses Projekt nicht Jahr für Jahr umsetzbar.
Falls Sie noch Anregungen oder Feedback zum Newsletter haben, dann antworten Sie gerne auf diese Mail oder direkt an
*|MC:SUBJECT|* *|MC_PREVIEW_TEXT|* Lions Racing Team e.V. – Newsletter Liebe Sponsoren, Freunde und Unterstützer, das Jahr neigt sich nun dem Ende zu, aber […]
Auch diesen Monat bieten sich wieder spannende Einblicke in die einzelnen Module. Es geht unter anderem um die Formen für die Flügel und unseres Monocoques, um Hard- und Software für unseren autonom fahrenden LR20 und um unser neues Getriebe!
Einwilligung verwalten
Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Einwillligung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Präferenzen
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.










{kind=link}
{kind=link}
{kind=link}
{kind=link}