Lions Racing Team e.V. – Newsletter
Liebe Sponsoren, Freunde und Unterstützer,
wir werden Sie weiterhin monatlich mit einem Update versorgen.
Auch diesen Monat bieten sich wieder spannende Einblicke in die einzelnen Module. Es geht unter anderem um die Formen für die Flügel und unseres Monocoques, um Hard- und Software für unseren autonom fahrenden LR20 und um unser neues Getriebe!
|
|
Grußwort der Teamleitung
Liebe Leserinnen und Leser,
wieder ist ein Monat in unserer Fertigung vergangen und unsere beiden Fahrzeuge gehen in schnellen Schritten ihrer Vollendung entgegen. Für unseren autonom fahrenden LR20 stehen noch diesen Monat die ersten Praxistests mit frisch überarbeiteten Aktorik an. Auch für unseren, noch von Menschen gesteuerten LR21, laufen die Arbeiten an den finalen Bauteilen auf Hochtouren. Dabei liegt ein besonderer Fokus auf den Arbeiten an unserem CFK-Monocoque und Aerodynamik-Paket, mehr dazu aber in den entsprechenden Abteilungsberichten.
Wir möchten uns mal wieder herzlich für Ihre positiven Rückmeldungen zum letzten Newsletter bedanken und wünschen Ihnen nun wieder viel Spaß dabei, sich im Folgenden, in die Details der verschiedenen Entwicklungen einzulesen. |
|
Aerodynamik Im April wurden die PU Formen für das Heckflügel-Hauptprofil und die kleinen Flügel von Front- und Heckflügel zunächst im Protohaus gefräst und dann nachbearbeitet mit anschließendem Versiegeln und Eintrennen.
Während die Heckflügel-Hauptprofilform eine Negativform ist, müssen diese bei den Flaps erst noch aus der PU-Positivform hergestellt werden. Dazu wurde zunächst Gelcoat auf die Positivform aufgetragen und danach mit 15 CFK-Lagen per Vakuuminfusion versteift. Diese Woche folgt der erste von zwei Tempergängen, eine Wärmebehandlung der Bauteile im Autoklav.
Konstruktiv wurde das DRS-System abgeschlossen. Des Weiteren ist die Überarbeitung der Konstruktion der Side-Extention fast abgeschlossen und es sind mehrere CFD-Simulationen für die unterschiedlichen Kombinationen, die sich aus dem Öffnen von Frontflügel- und/oder Heckflügel-DRS ergeben, in Arbeit.
Wir freuen uns, dass wir diesen Monat drei neue Modulmitglieder begrüßen durften, von denen sich zwei um CFD-Simulationen und einer hauptsächlich um die mechanische Konstruktion kümmern werden.
Bedanken möchten wir uns noch ganz herzlich bei WSL für das Wasserstrahlschneiden unserer Innenstrukturen von Front- und Heckflügel! |
|

|
|
Negativform des Heckflügel-Hauptprofil
|
|
|
|
|
Vakuuminfusion der Negativformen für die Flaps
|
|
Chassis
Nach der Entwicklung und Konstruktion folgt bekanntlich die Fertigung. Auch wenn die Entwicklung eines völlig neuen Monocoques und die Corona-Pandemie den Zeitplan im Vergleich zu den vorherigen Saisons etwas gestrafft hat, befindet sich das Team noch auf Kurs, die gesetzten Deadlines einzuhalten.
Im Chassis-Modul stand hierzu vor allem der Formbau im Fokus. Von selbst gefertigten Stahlblechformen über von Partnern gefräste PU-Formen bis hin zur Weiterverarbeitung der gefrästen PU-Positiv-Formen zu Negativ-Formen aus Faserverbundkunstoffen war alles, was das Herz begehrt, dabei. Selbst mittels Fused-Deposition-Modeling oder umgangssprachlich 3D-Druck wurden Formen für die finalen Bauteile hergestellt. Zudem wurde die Materialbeschaffung abgeschlossen.
Wie so häufig lohnt ein Blick auf das Herzstück des Chassis, das Monocoque!
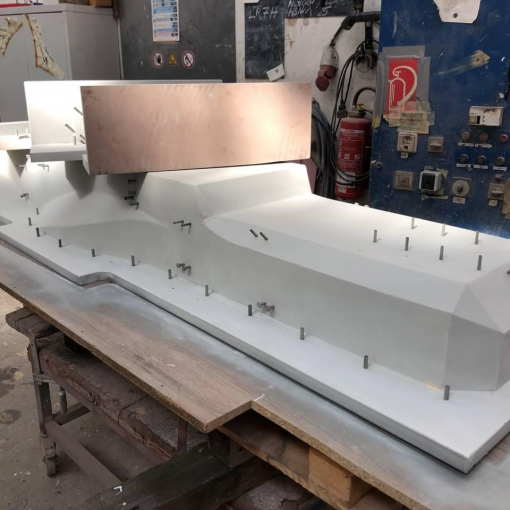
Nach dem die Positiv-PU-Form vom Lackierer in einem neuen Look bei uns angekommen ist, begann die weitere Vorbereitung der Herstellung unserer Negativform. Keine Sorge, das Lackieren hat natürlich nicht nur optische Gründe. Schick war es danach dennoch. Nachdem in der Zwischenzeit viel Erfahrung beim Bau von Testformen gesammelt werden konnte, wurde nun der Startschuss zur Fertigung der finalen Form geben.
|
|
|
|
|
Positivfomen des Monocoques beim Lackierer
|
|
Fahrdynamik
Im April konnten wir in der Fahrdynamik die Beschaffungsphase abschließen. So haben wir die letzten Bauteile bei unseren Fertigern bestellt. Somit sind wir bereit mit der Montage zu beginnen, sobald die bestellten Teile geliefert worden sind.
Parallel haben wir mit Belastungstests unseres Fahrwerks begonnen, um somit unser Konzept zu validieren und an dem Fertigstellen des Driverless Steering- und Braking-Systems des LR20 weitergearbeitet. Dieser ist nun aus fahrdynamischer Sicht in kurzer Zeit bereit autonom zu fahren.
Wie auch in der Saison 2019 vertrauen wir bei dem Antriebslayout des LR21 auf einen Radnabenmotor mit einem Planetengetriebe. Jedoch war eine komplett neue Getriebeauslegung sowie einige Konzeptänderungen notwendig, um die gesetzten Anforderungen an Bauraum und reduzierten Gewicht zu erfüllen.
Die größte Abwandlung besteht darin, nicht weiter den Planetensteg als Abtrieb zu benutzen, sondern dafür das Hohlrad zu nutzen, wodurch wir den nötigen Bauraum in axialer Richtung deutlich reduzieren konnten. Dies führt zwar an sich zu einem geringeren Verzahnungswirkungsgrad, die Vorteile durch den komplett im Reifen verschwundenen Radbereich, sowie das geringere Gewicht dieser Variante gleichen diesen Nachteil für unser Konzept jedoch aus. Weiterhin war es ein Ziel die Funktionen der Bauteile im Radbereich möglichst effizient zusammenzufassen, um so die Teilezahl gering zu halten. Dazu wird einerseits das Sonnenrad direkt auf die Motorwelle geschliffen und als ein Teil an den Rotor des Elektromotors verschraubt, andererseits werden die Planetenbolzen, sowie die Planeten selbst, direkt als Lagerschalen genutzt. |
|
|
|
|
Plantenegetriebe
|
|
|
|
|
Sonnenrad auf der Motorwelle
|
|
Driverless
Die Objekterkennung ist der erste Schritt, um ein Fahrzeug autonom bewegen zu können. Hierzu benutzen wir momentan eine Kamera sowie einen Lidar. Beide Datenquellen werden einzeln ausgewertet und abschließend in der Sensor-Fusion zusammengeführt.
Als Lidar-Sensor benutzen wir in dieser Saison einen Ouster OS1-64. Dieser liefert uns mit einer Frequenz von 10 Hz eine hochauflösende Punktewolke, welche es uns erlaubt bis zu 120 m vorauszusehen. Die vom Lidar gesendete PointCloud wird in zwei Stufen von der
Lidar-Objekterkennung verarbeitet.
Zunächst durchläuft die Punktewolke einen Filter, welcher für die Detection irrelevante Informationen entfernt. Hierbei wird ein Field-Of-View definiert, wodurch Informationen von Himmel und Boden entfernt werden. Des Weiteren werden alle Punkte, die nicht in Fahrtrichtung orientiert sind, ebenfalls gelöscht. Abschließend wird die PointCloud in ihrer Auflösung reduziert, um den Rechenaufwand der Detection zu verringern.
Die nun gefilterte PointCloud wird anschließend im Detection-Teil „geclustert“. Dies bedeutet, dass Punkte, welche nah genug beieinanderliegen, zu einem „Cluster“ zusammengefasst werden. Hierbei soll am Ende jedes erkannte Cluster einen Straßenleitkegel der abzufahrenden Rennstrecke darstellen. Durch die Definition von Parametern, wie z.B. einer minimalen Punktanzahl im Cluster und eines maximalen Punktabstands innerhalb eines Clusters, werden die Punkte zusammengefasst. Diese Cluster werden nun nach Größe in x-, y- und z-Richtung sortiert, sodass am Ende nur noch jene Cluster berücksichtigt werden, von denen ausgegangen wird, dass sie einem Straßenleitkegel entsprechen. Von diesen sortierten Clustern wird nun der Mittelpunkt berechnet und an die Sensor-Fusion, zum globalen Mapping der Kegelpositionen, übergeben.
In diesem Monat bestand die Aufgabe darin, die Parameter für den Filter, das Clustering und die Sortierung abzustimmen, um möglichst wenige Fehl-Detections zu erhalten. Das Resultat der Parameter-Optimierung ist im Vorher-Nachher-Vergleich der nachfolgend dargestellten Abbildung zu sehen. Die überwiegend in rot dargestellten Punkte entsprechen der PointCloud des Lidar-Sensors. Die Hellbauen „Würfel“ visualisieren die erkannten Cluster, an deren Positionen Straßenleitkegel erkannt wurden. Aufgrund der Parameter-Optimierung konnte die Großzahl der zuvor falsch detektieren Kegelpositionen stark minimiert werden.
|
|
|
|
|
Vorher-Nachher-Vergleich der Parameteroptimierung
|
|
Antrieb & Elektronik
Die Fertigungsphase ist in vollem Gange und trotz der, wegen der COVID-19-Pandemie entstandenen, Einschränkungen haben wir große Schritte zum fertigen LR21-System gemacht. Vor allem wurde es mithilfe unseres Partners BlueLaserTools geschafft, ein Probestack für den Akku zu bauen. Dieser wird demnächst auf dem elektrischen Prüfstand getestet und parametrisiert. Außerdem wurden große Fortschritte bei dem Motor-Umrichter-Systemen gemacht, indem sowohl an Hardware als auch an Software der Motor Control Units (MCU) gearbeitet wurde.
Abgesehen vom Fortschritt am LR21 wurde im April auch aktiv am LR20 gearbeitet. Es bestand der Bedarf eine Dashboard-Ersatzplatine zu fertigen. Dieses Steuergerät ist eine Kommunikations-Schnittstelle zu den Bordsystemen. Sie erlaubt uns schnell die wichtigsten Informationen, wie Akkuspannung, ausgewählte Mission, Bremsdruck oder Shutdown Circuit Status auf dem Bildschirm anzeigen zu lassen. Um den Regeln und den neuen Anforderungen des autonomen Fahrzeugs besser zu entsprechen, wurde für den LR20 ein größerer und hellerer Bildschirm gewählt und somit auch eine neue Platine entwickelt. Diese kann man auf dem Foto unten sehen. In den folgenden Newsletter-Ausgaben werden wir gerne die weiteren Einblicke in das elektrische System des LR20 werfen. |
|
|
|
|
Dashboardplatine des LR20
|
|
|
|











{kind=link}
{kind=link}
{kind=link}
{kind=link}